企业免费推广平台
武汉盖尔德纳科技有限公司生物化学实验设备的技术研发及网上销售;测量仪器、通讯设备(不含无线电发射装置)、机械设备、电子产品、日用百货、计算机软硬件及配件的网上销售等。
159****2867
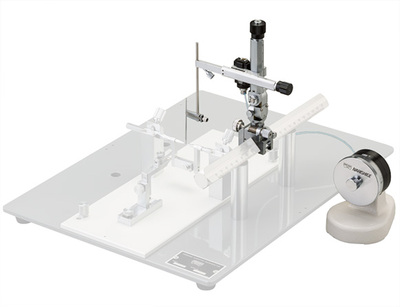
MMO-202ND
三轴悬吊操纵杆液压式微型机械手。
三维操纵杆操作,同时保持一个简单的姿势。
MMO-202ND微型机械手的特点是一种油液压操纵杆,使一个单一的杠杆能够使三维运动平稳。因为操纵杆是悬挂式的,所以它可以被使用者的手臂和手舒服地放在桌子上。因此,手术是一种自然的姿势,可以维持较长时间。在其他提升易用性的特点中,在控制单元顶部的可动比例调整部分,以及单元的熟悉的圆形设计,而不是传统设备上的更角形状。

*对显微镜的附件,需要一个粗糙的机械手和合适的安装适配器(分开销售)。
*选择TypeB适配器,将该机械手与MMN-1粗机械手组合在一起。
*改变*接头,包括与显微操作器的双吸管架HD-21(单独销售),支持胚胎活组织检查。
*改变万向接头,将微型机械装置与MMO-220A型单轴油液压微动装置(单独销售)相结合,实现四维遥控运动。
*与返回机制UT-R(单独出售)相结合,MMO-202ND允许机制收回并返回移液管。
| MMO-202ND | MMO-202ND Three-axis Hanging Joystick Oil Hydraulic Micromanipulator(3维油压微操作手) | |
| 附件 | IP铁板,UT-2*接头,CF-3固定夹,通用扳手 | |
| X10mm,Y10mm,Z10mm | ||
| 运转幅度 | 微调 | 全转旋钮:250μm |
| *小刻度值:2.5μm | ||
| 操纵杆:2mm | ||
| 尺寸/重量 | 控制装置 | W75*D75*H115mm,0.85kg |
| 驱动装置 | W70*D50*H80mm,0.15kg | |
 |  | |
| MN-4 | MN-4 Coarse Manipulator(粗调微操作手) | |
| 附件 | 通用扳手 | |
| 运转幅度 | 粗调 | X30mm,Y30mm,Z30mm |
| 尺寸/重量 | W125*D110*H135mm,0.6kg | |
MMO-203 三轴液压显微操纵器 原始的液压模型,具有较大的旋钮,具有良好的线性度。 该微型机械手的液压驱动系统可以远程控制,并提供平稳,无振动的运动。作为vernier类型的继任者,它的特点是一个大的圆筒控制单元,可以很好的操作。另一个关键特征是线性位置的高复制。与目前流行的操纵杆方法相比,该控制单元设计简单,成本效益突出,在客户中有着较长的使用记录。对于微注射系统,建议将该模型与操纵杆式机械手结合使用。
| ||

*对显微镜的附件,需要一个粗糙的机械手和合适的安装适配器(分开销售)。
*选择TypeB适配器,将该机械手与MMN-1粗机械手组合在一起。
*将微操作器内的球关节改变为双吸管架HD-21(单独销售),可实现胚胎活检。
*将微型机械手加入到MMO-220A单轴油液压微动器(单独销售)中,可实现四维遥控运动。
MMO-203 Three-axis Oil Hydraulic Micromanipulator(3维油压微操作手)
B-8C球形接头,H-7移液管架,CF-3固定夹
X10mm,Y10mm,Z10mm
微调全转旋钮:250μm
*小刻度值:1μm
控制装置W115*D115*H132mm,1.6kg
驱动装置W70*D50*H80mm,0.15kg
MN-4 Coarse Manipulator(粗调微操作手)
通用扳手
粗调X30mm,Y30mm,Z30mm
W125*D110*H135mm,0.6kg



| MN-151 | MN-151 Joystick Micromanipulator(微操作手) |
| 附件 | B-8B 球形接头 ,P-1A 高度调节板,H-7 移液管架, 通用扳手 |
| 运转幅度 | 粗调:X25mm,Y20mm,Z25mm |
| 微调:Z 轴 8mm:250μm的全转旋钮 | |
| *小刻度值:微调5μm | |
| 操纵杆控制 1:150-1:15 | |
| (X-Y 平面旋转比率) | |
| GJ-1 | |
| 磁力表座尺寸 | W50*D80*H55mm |
| 尺寸/重量 | W50*D80*H230mm,1.5kg |
| IP | Iron Plate(铁盘) |
| 尺寸重量 | W250*D200*H6mm,2.4kg |
    |
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
武汉盖尔德纳科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.


